大気中・超真空(UHV)・光学における高精度モーションコントロールデバイス製品情報『日本カンタム・デザイン株式会社』

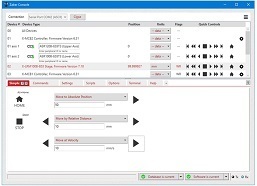
モータコントローラドライバー & ジョイスティック
| 型番:X-MCC1~4 (最新モデルモータコントローラ&ドライバー1軸〜4軸仕様まで) |





| モデル: X-MCC1 |
|
| モデル: X-MCC2 |
|
| モデル: X-MCC3 |
|
| モデル: X-MCC4 |
|
| E-STOP (緊急停止ボタン) | この緊急停止は、ZaberのX-MCCシリーズコントローラで使用するように設計されており、コントローラの電源を切ることなく、接続されているすべての軸を同時に緊急停止致します。(電源遮断無し) |
| データシート | >>X-MCC1 ~X-MCC4 データシート | |
| マニュアル (和文) | >>X-MCC シリーズマニュル(和文) | |
| Manual(確認用) | >>X-MCC Series Manual | |
| ||

| - Line up - |





















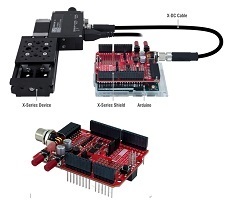
Arduino (アルディーノ)マイクロコントローラを活用した完全自動制御システム が構築できます。PCを専有しないで、多軸ステージの自動運転や、PLCでの精密ステージの自動運転ができます。
>>Arduino マイコン+シールドによる自動化



- 製品カテゴリー > 光学素子
- 製品カテゴリー > カラーセンサー
- Legacy Products